Điều Khiển Servo Với Position Module QD77MS_

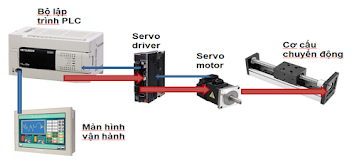
Chào các bạn ! Bài viết hôm nay mình hướng dẫn cơ bản về cách điều khiển động cơ servo của Mitsubishi MR-J4 B Bài viết gồm 3 phần : - Cấu hình phần cứng - Cấu hình phần mềm - Chương trình lập trình PLC I. Cấu hình phần cứng hệ thống QD77MS 1. Sơ đồ nguyên lý - Nguyên lý : + Người lập trình tạo ra một chương trình điều khiển theo yêu cầu của bài toán nào đó. Khi một lệnh điều khiển được thực hiện thì lệnh đó sẽ mã hóa và chuỗi mã hóa đó đến Servo amplifier thông qua module QD77MS. + Khi Servo amplifier nhận được mã lệnh thì sẽ thực hiện quá trình băm xung điều áp để điểu khiển Servo motor chạy đúng theo mã lệnh (Vị trí, tốc độ..) + Trong quá trình chạy thì Amplifier cũng đọc dữ liệu phản hổi từ encoder của động cơ và dòng điện tải, tính toán rồi gửi vị trí hiện tại về QD77MS module, bằng cách đọc các vùng nhớ chức năng trên module QD77MS mà PLC CPU có được c...