Điều Khiển Servo Với Position Module QD77MS_
Chào các bạn !
Bài viết hôm nay mình hướng dẫn cơ bản về cách điều khiển động cơ servo của Mitsubishi MR-J4 B
Bài viết gồm 3 phần :
- Cấu hình phần cứng
- Cấu hình phần mềm
- Chương trình lập trình PLC

I. Cấu hình phần cứng hệ thống QD77MS
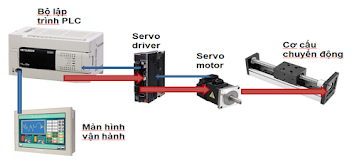
1. Sơ đồ nguyên lý

- Nguyên lý :
+ Người lập trình tạo ra một chương trình điều khiển theo yêu cầu của bài toán nào đó. Khi một lệnh điều khiển được thực hiện thì lệnh đó sẽ mã hóa và chuỗi mã hóa đó đến Servo amplifier thông qua module QD77MS.
+ Khi Servo amplifier nhận được mã lệnh thì sẽ thực hiện quá trình băm xung điều áp để điểu khiển Servo motor chạy đúng theo mã lệnh (Vị trí, tốc độ..)
+ Trong quá trình chạy thì Amplifier cũng đọc dữ liệu phản hổi từ encoder của động cơ và dòng điện tải, tính toán rồi gửi vị trí hiện tại về QD77MS module, bằng cách đọc các vùng nhớ chức năng trên module QD77MS mà PLC CPU có được các thống số (Vị trí, tải, tốc độ...) từ động cơ servo. Nhờ đó mà PLC CPU có thể giám sát được toàn bộ quá trình hoạt động của động cơ servo.
+ Việc truyền nhận dữ liệu giữa amplifier và QD77MS dùng để hệ thống truyền thông SSCNET III với MR-J3 B, SSCNET III(H) với MR-J4 B. Đường truyền là sợi cáp quang 2 chiều.
=> Hệ thống điều khiển dùng QD77MS là hệ thống khép kín.
2. Sơ đồ đấu nối


-Sau khi chúng ta cấu hình phần cứng hoàn thành, sau đây là quá trình cấu hình phần mềm
-Để cấu hình phần mền ta cần dùng đến phần mềm : Melsoft Serial Simple Motion

Phần mềm sau khi mở lên !
- Tiếp theo ta tiến hành cấu hình cho hệ thống



B6 : Cài đặt cơ bản cho module

B7 : Cài đặt cơ bản cho Amplifier

- Bước tiếp theo là cái Parameter cho hệ thống :


III. Chương trình lập trình trên PLC
- Sau đây mình sẽ hướng dẫn lập trình để điều khiển một trục servo với chế độ chạy điều khiển vị trị linear
1. Tổng quan các bước thực hiện

2. Chương trình PLC



- Trên đây mình đã trình bày cách để để điều khiển động cơ servo khi dùng mudule motion QD77MS.
Đó chỉ là các hiểu biết cơ bản để các bạn mới có thể có những hiểu biết ban đầu về điều khiển servo.
- Chúc các bạn thành công !
https://www.youtube.com/watch?v=O3dd4R_yzLw&t=126s

Nhận xét
Đăng nhận xét