PLC FX ĐIỀU KHIỂN SERVO MR-J3A
Chào các bạn !
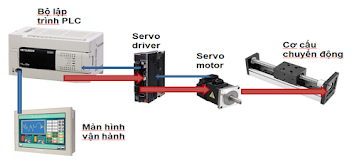
Bài viết hôm nay mình hướng dẫn điều khiển động cơ servo MR-J3A bằng PLC FX - MT
Bài viết gồm 3 phần :
- Sơ đồ đấu nối hệ thống
- Cài đặt tham số cho MR-J3 A
- Chương trình PLC
1. Sơ đồ đấu nối hệ thống :
a. Sơ đồ mạch lực

- Trên đây là sơ đồ đấu nối mạch lực cho hệ thống servo, trong đó đầu nối SM-50 dùng để hàn các tín hiệu vào ra cho driver J3, giắc này được kết nối vào CN1 trên driver
b. Sơ đồ mạch kết nối với PLC

- Ảnh trên là sơ đồ đấu nối các chân CN1 cùng chân số tương ứng với PLC và nguồn. Trong thực tế có 2 dạng Com của PLC (xuất 0V và xuất 24V ), như hình bên trái là các đấu nối cho PLC có com là 0V và hình bên phải là dùng cho PLC có com là 24V
- Các chân CN1 cần đấu nối : OPC, DICOM, DICOM là các chân com
+ LSP (43) : chân giới hạn trên cho hành trình của động cơ servo
+ LSN (44) : chân giới hạn dưới cho hành trình của động cơ servo
+ EMG (42) : chân nối với nút dừng khẩn cấp, nối với đầu ra cảu PLC
+ SON (15) : chân servo on, nối với đầu ra của PLC
+ PP (10) : chân nhận sung âm dùng khi PLC có com 0V để điều khiển servo
+ NP (35) : chân nhận sung âm dùng khi PLC có com 0V để điều khiển servo
+ PG (11) : chân nhận sung âm dùng khi PLC có com 24V để điều khiển servo
+ PG (35) : chân nhận sung âm dùng khi PLC có com 24V để điều khiển servo
- Đầu ra của PLC : Y0 là chân phát xung, Y1 chân điều khiển chiều quay
Chú ý : khi chọn PLC các bạn phải chọn PLC FX dòng MT, vị dòng MT mới có chân phát xung là " Y00, Y01, Y02".
2. Cài đặt tham số cho MR-J3 A :
- Ở đây mình chỉ cài một số tham số cần thiết đáp ứng được đề bài hôm nay
+ PA01 : cài chế độ điều khiển , bài toán cảu mình là điều khiển vị trí

+ PA05, PA06,PA07 : tham số cài tỉ lệ xung driver nhận được trên vòng quay của động cơ

Mình dùng xung âm và đào chiều quay bằng trạng thái 0 hoặc 1 ở chân NP.
Nêu các bạn dùng PLC COM 24V thì chọn ở phần " Positive logic "

3. Lệnh lập trình PLC :
a. Lệnh chạy vị trí

b. Lệnh Origin :

c. Chương trình PLC :
- Lệnh khởi tạo hệ thống :

Y002 : đầu ra của PLC điều khiển cho Servo ON
Y003 : đầu ra của PLC điều khiển tín hiều dừng khẩn cấp
Chú ý: trong quá trình chạy thì Servo ON và Emergency pải luôn ON
- Lệnh điểu khiển vị trí dùng PLSY và PLSR :

+ Với lệnh PLSY : chân phát xung là Y0, Tần số phát sung là 6000 (tốc độ), vị trí cần đến là 6000
+ Với lệnh PLSR : chân phát xung là Y0, tần số phát sung là 5000 (tốc độ), vi trí 5000, thời gian tăng giảm tốc 1000
- Lệnh điều khiển dùng DRVI và DRVA :

+ Lênh DRVI : lênh điều khiển vị trí tương đối, vị trí điều khiển là 3000, tốc độ phát xung là 2000, chân phát xung là Y002. Ở lệnh này để đào chiều quay thông qua Y4 ON hoặc OFF
+ Lệnh DRVA : lệnh điều khiển vị trí tuyệt đối, nó sẽ tự động xác định chiều quay khi có lệnh chạy phụ thuộc vào vị trí cần đến lớn hơn hay nhỏ hơn vị trí hiện tại. Vị trí điều khiển ở đây là 1000, tốc độ phát xung là 2000, chân phát xung là Y002. Với lệnh này hệ thống cần xác định được lệnh Origin
- Lệnh Origin :

+Lệnh ZRN : chỉ cần một cảm biến "Dog sensor" lắp ở vị trí xác định gốc, khi lệnh được thực hiện, động cơ sẽ quay theo chiều xác định bằng tín hiều của chân "NP" với tốc độ "Creep" (=200) khi gặp tín hiệu của cảm biến "X001", lúc này hệ thống đã xác định vị trí đó là vị trí gốc, động cơ dừng lại và giá trị "Current" sẽ tự động xóa về bằng "0", ở đây chân phát xung là Y0.
+ Lệnh DSZR : cần hai cảm biến là "Dog sensor" và "Zero point sensor", khi lệnh được thực hiện động cơ sẽ quay theo chiều xác địch bằng tín hiều của "Y001" với tốc độ bình thường đến khi gắp tín hiệu cảm biến "Dog sensor" X001 thì tốc độ sẽ giảm về tốc độ "Creep ", đến khi gặp tín hiệu cảm biến "Zero point" động cơ sẽ dụng lại và xác định vị trí đó là vị trí gốc, đồng thời lúc này giá trị " Current" được xóa về băng "0".
=> Trên đây là bài viết ngắn gọn về phát xung điều khiển servo, hi vọng sẽ giúp các bạn có thể áp dụng vào bài toán trong thực tế, chúc các bạn thành công.
Xin chân thành cảm !

Nhận xét
Đăng nhận xét